
Piezoelectricity is a property of certain classes of crystalline materials. This piezoelectric phenomenon is similar to electrostriction, which is a property of all dielectrics. They have different mechanisms when subjected to an electric field. Usually the electrostrictive effect is very small and the direction of this small change in geometry does not change if the direction of the electrical field is reversed. In contrast to this situation, piezoelectric materials exhibit a reversal in the direction of geometrical change when the direction of the electrical field is reversed.
The crystal lattice of a material should have no center of symmetry so that the piezoelectric phenomenon could occur. Among the 32 classes of crystal materials, 11 types own a center of symmetry and are non-polar. The other 21 crystal classes are non-centrosymmetric, and 20 of these exhibit the piezoelectric effect. Only the cubic system possesses symmetry characteristics that combine to result in no piezoelectric effect.
The most commonly produced piezoelectric ceramics include barium titanate ( BaTiO3 ), lead titanate ( PbTiO3 ) and lead zirconate titanate ( Pb(ZrTi)O3, PZT ). PZT belongs to perovskite crystal structure with the general formula ABO3. The atom location of PZT in perovskite structure is shown in Figure 1. The asymmetric location of Ti or Zr in the unit cell generates an electric dipole moment. The piezoelectric ceramic after sintering consists of a great number of small grains. Each grain can be divided into many domains where the dipole directions of unit cells in a domain are the same. Due to random orientations of grains after sintering, the net polarization of the ceramic is zero, i.e. the material does not exhibit piezoelectric properties.
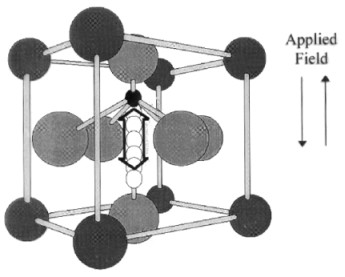
The manufacturing of piezoelectric ceramics involves exposing the ceramic to high temperatures while imposing a high electric field intensity in a desired direction to create the piezoelectric properties. It is termed ‘poling’. PZT during poling, (for example, an electrical field) is applied and causes the movement of Ti or Zr, and the change of dipole moment direction. The randomly oriented dipole domains will be aligned during poling. Therefore, the polarization of the PZT ceramic part is established as shown in Figure 2.
Piezoelectric ceramic components are efficient electromechanical transducers which have transformation functions between mechanical energy and electrical energy. A piezoelectric cylinder (Figure 3(A)) with electrodes over its two flat faces is polarized in the direction indicated by P. A. compressive stress on the material (Figure 3(B)), which causes a transient current to flow in the external circuit and a tensile stress on the material (Figure 3(C)) produces current in the opposite direction. The phenomena above is called a direct piezoelectric effect, which could transform mechanical energy into electrical energy. An inverse piezoelectric effect is defined to transform electrical energy into mechanical energy. We illustrate this reverse action by applying an electric field to produce a compressive strain in the material (Figure 3(D)); reversal of the electric field causes a tensile strain (Figure 3(E)). While applying alternative cycles of the electric field on the material, it would continue to change its dimensions with both compressive strain and tensile strain (Figure 3(F)).
Piezoelectric ceramics have high efficiency in the transformation between mechanical and electrical energies. They have become well established as the preferred material for a wide variety of electromechanical devices and will play more roles when the need of human-machine-environment interaction increases. Their applications include:
- Low intensity sonic and ultrasonic sources (such as air transducers, delay lines, medical instrumentation and nondestructive evaluation instrumentation).
- High intensity sonic and ultrasonic sources (such as sonar projectors, ultrasonic welding, and machining).
- Sensors of various types (such as microphones, hydrophones, and phonograph pickups).
- Actuators and positioning devices for fine control of motion.
- High voltage pulse generators for igniters of various types.
- Non-transducer devices (such as transformers and electromechanical filters)