超音波傳感器(Ultrasonic transducer)
超音波傳感器可用於水中聲納(sonar)及空氣中短距離的物件偵測(proximity measurement)。藉由超音波傳感器發射出之超音波傳遞到物體表面,再接收自物體表面反射的超音波,並利用超音波的飛行時間( Time of Flight, ToF) 進行計算,即可得知超音波傳感器與待偵測物體之間的距離。或者,利用超音波於單張薄片及多張薄片的穿透能量的差異,可以進行雙張偵測,藉以判斷是否產生疊片。對於超音波偵測而言,待偵測物體的類型與性質並不會受到形狀、材質、顏色、透明度、硬度等影響,且不論固體、液體、或粉體等,都可以用超音波傳感器來進行偵測。故此,現今超音波傳感器已廣泛應用在水中聲納(sonar)、倒車雷達(parking sensor)、位高偵測(level sensor)、雙張薄片偵測(double feed detection)及流量偵測(flow meter)等範疇。

超音波傳感器結構
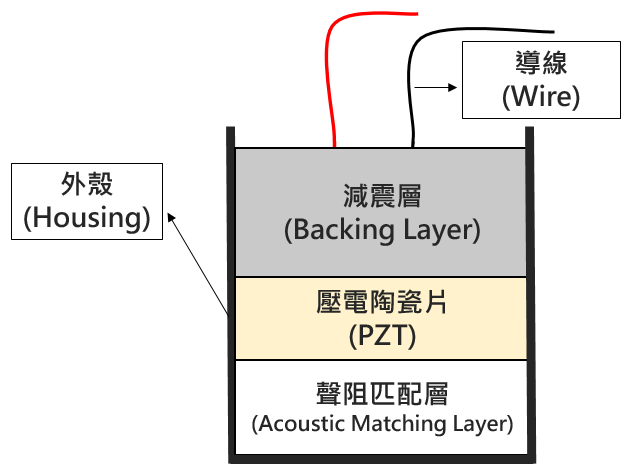
如圖 1 所示,超音波傳感器是由壓電陶瓷、聲阻匹配層及減震層所構成。壓電陶瓷片(piezoceramics)的主要成分為鋯鈦酸鉛(Lead Zirconate Titanate, PZT),在其雙面會塗佈導電層,在運作中對壓電陶瓷的導電層施加高頻交流電即可藉由逆壓電效應(電能轉換機械能)讓壓電陶瓷產生高頻率振動,該高頻率震動是一種聲波,如果此聲波的頻率落在超音波範圍(≧20 kHz),即為超音波振動。相對的,利用壓電陶瓷的正壓電效應(機械能轉換電能)即可接收超音波。
超音波傳感器設計原理
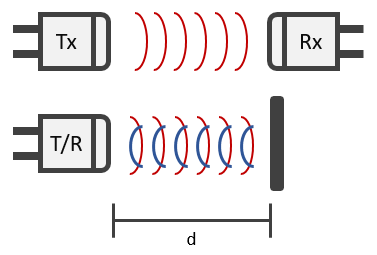
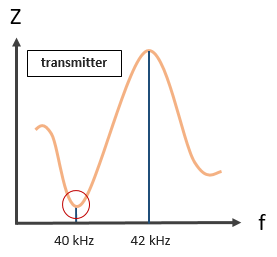
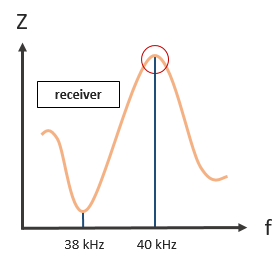
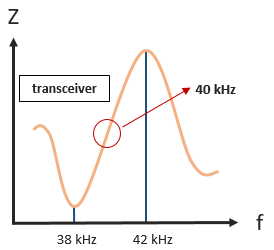
超音波傳感器依功能可分為發射傳感器(transmitter)、接收傳感器(receiver)、以及收發一體的傳感器(transceiver),如圖 2 所示。將超音波傳感器的共振頻率(resonant frequency, fr)設計在接近所施加電訊號的頻率(operating frequency),以40 kHz 為例,如圖 3 所示,可以讓超音波的發射效率最佳化。反之,將超音波傳感器的反共振頻率(anti-resonant frequency, fa)設計在接近所接收的超音波頻率,如圖 4 所示,則可以讓超音波的接收效率最佳化;收發一體的超音波傳感器(transceiver)則是將所施加電訊號的頻率 (operating frequency)設計介於超音波傳感器的共振頻率(fr)與反共振頻率(fa)之間,如圖 5 所示。傳感器的操作頻率越高,解析度越好,相對的高頻聲波傳遞時的衰減也越大,所以感測的距離就越小。
然而,為了讓所產生的超音波能從壓電陶瓷傳送到物體或是流體中(例如: 空氣中或是水中),壓電陶瓷的聲阻(acoustic impedance)必須與物體或是流體的聲阻匹配才行。常見物質的聲速及聲阻特性如下:
| 物質 | 密度 (ρ) Kg/M3 | 聲速 (C) m/sec | 聲阻 (Z) 106 Kg/M2∙sec |
| 壓電陶瓷 | 7800 | 4500 | 35.10 |
| 水 | 1000 | 1480 | 1.48 |
| 空氣 | 1.22 | 340 | 0.000414 |
| 玻璃 | 2200 | 5500 | 12.10 |
| 環氧樹脂 | 1200 | 1600 | 3.12 |
| 矽膠 | 1250 | 1040 | 1.30 |
| 聚氨酯 | 1300 | 2000 | 2.60 |
| 不鏽鋼 | 7800 | 5900 | 46.02 |
| 鋁 | 2730 | 6380 | 17.41 |
我們以超音波空氣傳感器為例子來說明,聲阻(Z)=材料密度(ρ)*聲速(C),壓電陶瓷的聲阻約為 35 MRayl(106公斤/平方公尺∙秒),空氣的聲阻約為 414 Rayl(公斤/平方公尺∙秒),壓電陶瓷的聲阻與空氣的聲阻,有非常大的差距,導致壓電陶瓷所產生的超音波能量無法傳遞到空氣中,故此,聲阻匹配層(acoustic matching layer)就成了超音波傳感器中必要的部件,其會設置在壓電陶瓷與空氣之間,使得兩者的聲阻得以匹配,從而可以有效地將超音波傳遞到空氣中。用於空氣傳感器(ultrasonic air transducer)的匹配層的聲阻,最理想值為:  Rayl,約為0.122 MRayl,但是自然界中很難找到聲阻低於 1 MRayl而且又耐用的材料。目前一般業界常用的聲阻匹配層材料為高分子樹脂與空心粉體混合成的複合材料,來達到較低的聲阻特性,同時也具有較佳的耐候性及可靠度。
Rayl,約為0.122 MRayl,但是自然界中很難找到聲阻低於 1 MRayl而且又耐用的材料。目前一般業界常用的聲阻匹配層材料為高分子樹脂與空心粉體混合成的複合材料,來達到較低的聲阻特性,同時也具有較佳的耐候性及可靠度。
超音波傳感器依使用情境可分成發射-接收的組合 (pitch-catch mode)或是單獨使用收發一體的超音波傳感器 (pitch-echo mode)。須注意的是超音波傳感器具有殘響(ringing)的特性,當使用超音波傳感器來做為近距離的物體偵測時,殘響限制了最小的偵測距離。一般使用減震層 (backing layer)來讓超音波傳感器快速恢復其靜止狀態以降低其殘響。
如何選擇合適的超音波傳感器
可以由以下的特性來判斷:感度(sensitivity)、指向性(directivity) 以及盲區(blind zone),說明如下:
感度 (sensitivity)
在了解感度之前,須先介紹聲壓位準 (Sound Pressure Level, SPL) :
SPL是指相對於一個基準值大小,以對數尺衡量的有效聲壓,定義為:
SPL =20*log(P/Pref);度量單位為dB
其中 P 為聲壓(sound pressure),Pref 為標準參考聲壓。一般Pref 定義為0.0002 ubar (由人類聽閾而來)。但為了方便表達超音波傳感器的性能,會用感度來表示接收強度。
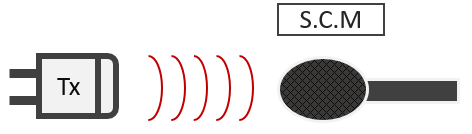
感度(sensitivity)又稱為靈敏度,單位通常為V/Pa 或者mV/Pa ( V: 接收電壓,Pa: Pascal )。發射強度定義為在輸入給超音波傳感器一特定頻率訊號及功率後,在一定距離外之標準麥克風(standard condenser microphone, S.C.M)所獲得之聲壓,如圖 6。
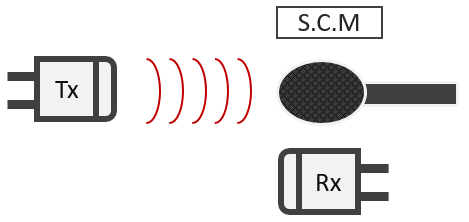
接收感度定義為超音波傳感器發射一固定聲壓,並由在一定距離外之標準麥克風及待測超音波傳感器接收,如圖 7。而標準麥克風與傳感器在接收此聲壓後轉換為電壓並輸出,兩者進行比較,便能得知傳感器之感度大小,因此可由接受傳感器的輸出電壓大小來判別接收傳感器的感度高低,接收傳感器輸出電壓越大,感度越高。
指向性 (directivity)
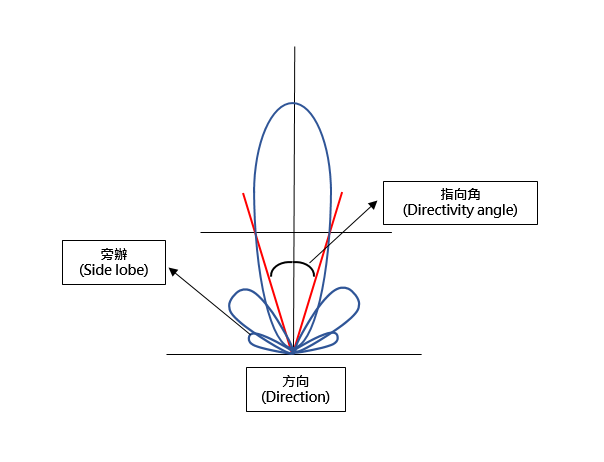
超音波傳感器的指向性定義是超音波傳感器傳送超音波的主要方向於一定距離的最大強度定義為0 dB,測量其相對角度的相對超音波強度,一般定義相對超音波強度-3 dB或是-6 dB的角度為指向角,如圖 8所示。超音波傳感器之指向角受到聲波的波長大小及發射面的尺寸所影響,發射頻率越高,波長越小,指向角也越小;發射面尺寸越大,指向角越小。
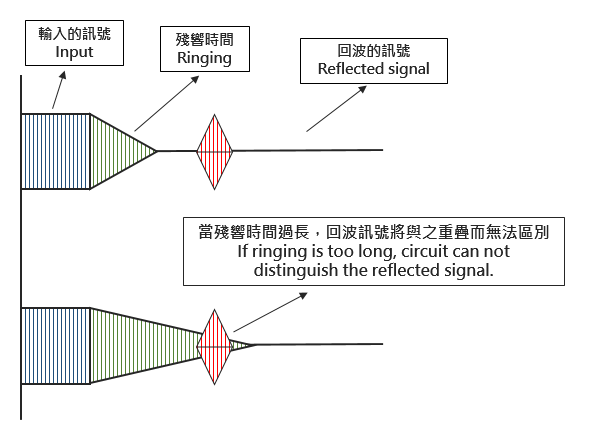
盲區意即超音波傳感器的最小偵測距離,影響盲區大小的主要因素為殘響時間(ringing)。當傳感器接收到特定頻率之電訊號,壓電陶瓷片相對應的產生震動並發射出超音波,但此震動並非如電路開關般即時停止,而是在經過主要震動後,加上減震層的輔助,逐漸趨於平緩到靜止,在主要震動結束至靜止的這段時間即稱為殘響時間。為何殘響時間會影響盲區大小呢?以收發一體之傳感器為例,在偵測物體的距離時,我們利用輸入電源訊號與回波訊號間的時間差來進行運算,當殘響時間過長,導致回波訊號與輸入電源訊號重疊,便會影響訊號的判讀,如圖9。